So Arm100 101 Parallel Gripper
3D-printed parallel gripper compatible with Feetech STS3215 and Waveshare ST3215 servos. Ready-to-use solution for the SO-ARM 100/SO-ARM 101.
Overview
SO-ARM100/101 Parallel Gripper
<div align="center">

🎥 Watch the gripper in action!
A lightweight 3D-printed parallel gripper designed by Robonine for the open-source SO-ARM100/101 robotic platform.



Questions? We're here to help!
📩 Email: hello@robonine.com
</div>
✨ Key Features
| Feature | Description |
|---|
| 120N Gripping Force | Reliable parallel jaw mechanism |
| 14 mm/s Speed | Gripper operation speed |
| 84mm Full Stroke | Wide opening for various objects |
| 0.5mm Repeatability | High precision positioning |
| Camera Compatible | Supports RealSense, Orbbec, USB cameras |
| 3D Printable | All parts print on standard FDM printers |
| ~$62 Total Cost | Affordable open-source solution |
| Easy Assembly | 30-45 minutes with basic tools |
📸 Gallery
<div align="center">
Gripper on SO-ARM101
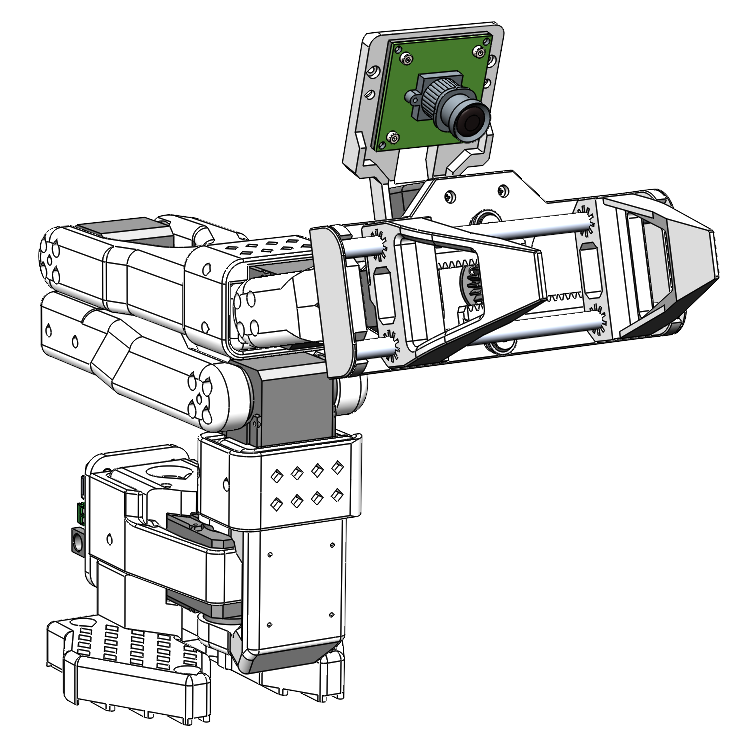
Follower gripper integrated with SO-ARM101 robot arm
Dimensions
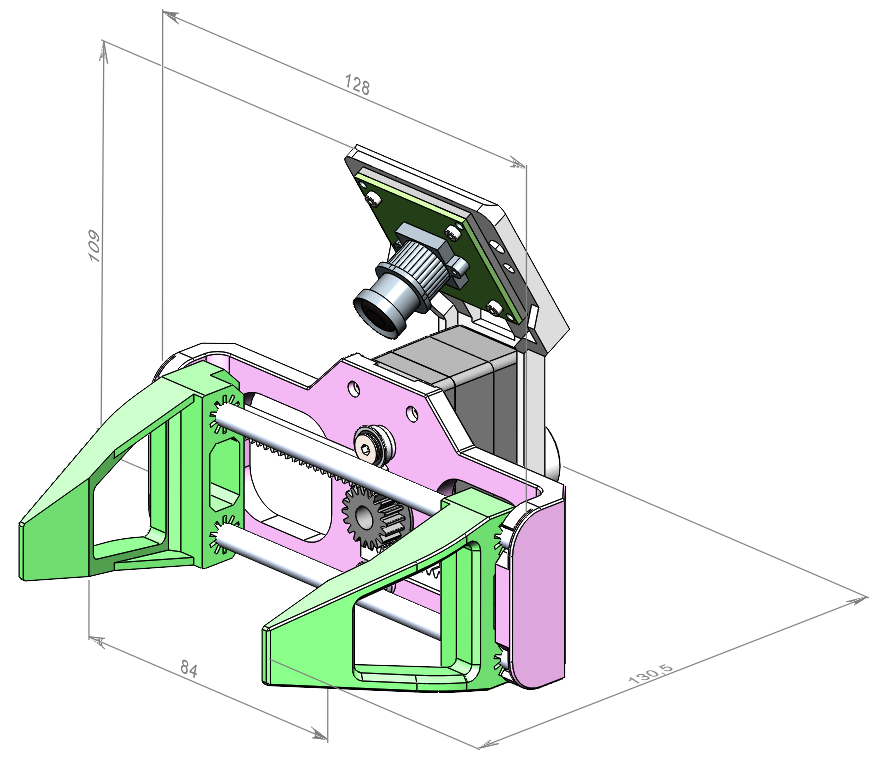
128 × 109 × 130.5 mm, full stroke 84 mm
</div>
📋 Specifications
Gripper Parameters
| Parameter | Value |
|---|
| Maximum gripping force | 120 N |
| Maximum gripping speed | 14 mm/s |
| Full stroke | 84 mm |
| Repeatability | 0.5 mm |
| Assembly mass (PLA, 30% infill) | 170 g |
| DOF | 1 |
Dimensions
| Dimension | Value |
|---|
| Width | 128 mm |
| Depth | 130.5 mm |
| Height | 109 mm |
Servo Parameters (Feetech STS3215)
| Parameter | Value |
|---|
| Operating Voltage | 12V |
| Stall torque | 30 kg·cm |
| Speed (no load) | 45 RPM |
| Encoder | Absolute magnetic 12-bit |
| Protocol | RS485/TTL up to 1 Mbps |
| Operating temperature | -20°C ~ 60°C |
📷 Camera Compatibility
The gripper supports multiple cameras via interchangeable camera holder:
| Camera | Type | Use Case |
|---|
| IMX335 5MP USB | RGB | Basic vision tasks |
| GC2093 2MP USB | RGB | Budget option |
| Orbbec Gemini 2 | RGB-D | 3D perception |
| RealSense D405 | RGB-D | Close-range depth |
| RealSense D435/D435i | RGB-D | General purpose |
| RealSense D455 | RGB-D | Long-range depth |
<div align="center">
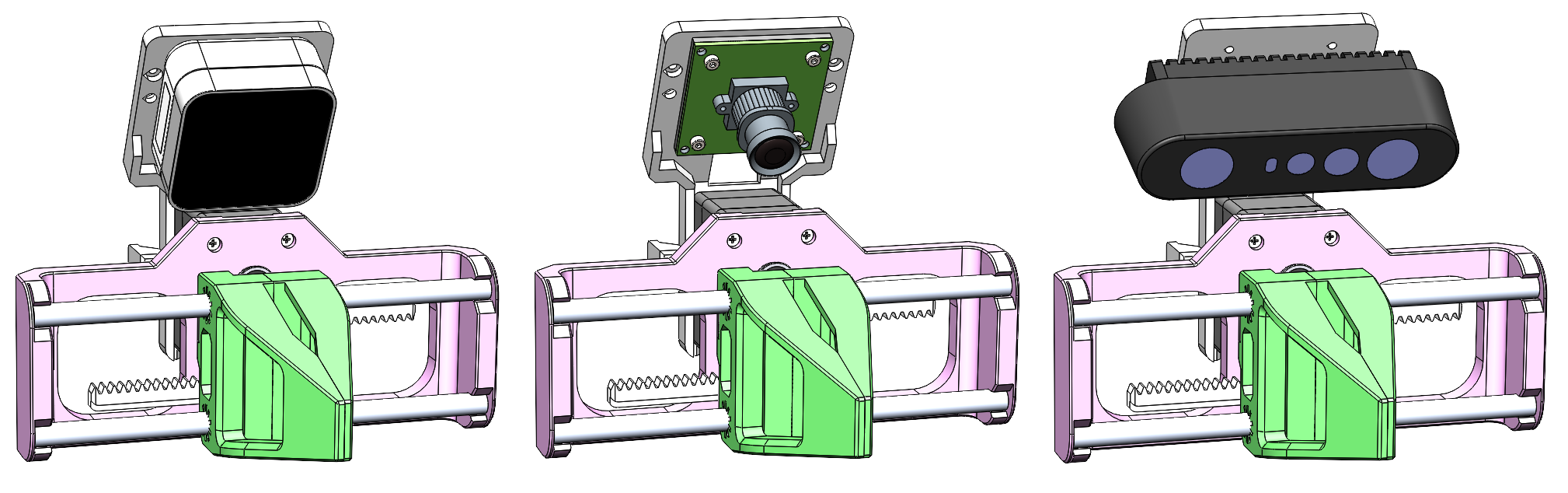
RealSense, USB camera module, Orbbec Gemini 2
</div>
💰 Bill of Materials
Total Cost: ~$62 (Full BOM with Amazon links)
| Category | Components | Est. Cost |
|---|
| Electronics | Feetech STS3215 Servo + Servo Bus Adapter | ~$40 |
| Bearings | MF106ZZ (x2) | ~$2 |
| Aluminium/Carbon Tubes | D6x1×125mm (x2) | ~$4 |
| 3D Printing | 8 parts (~100-150g PLA) | ~$12 |
| Fasteners | M2/M4 screws, M2 nuts, M3 set screws | ~$3 |
🚀 Quick Start
1. Print the Parts (2-4 hours)
Download STL files from models/parts/. Compatible with popular printers like Bambu Lab A1 mini, Prusa MINI+, and any printer with ≥180×180mm bed.
| Part | Qty | Settings |
|---|
| Main frame (RB9.01.062.010) | 1 | 20% infill |
| Clamp (RB9.01.062.020) | 2 | 20% infill |
| Gear rack (RB9.01.062.030) | 2 | 30% infill |
| Gear (RB9.01.062.040) | 1 | 30% infill |
| Camera holder (RB9.01.060.074) | 1 | 20% infill |
| Holder (RB9.01.060.080) | 1 | 20% infill |
| Camera Spacer (RB9.01.060.090) | 1 | 20% infill |
2. Order Components (1-2 days)
See Bill of Materials for direct Amazon links.
3. Assemble (30-45 minutes)
Follow the Assembly Guide with step-by-step images:
- Mount gear on servo disc, install this assembly on servo
- Insert servo cable
- Using Feetech software move servo to its minimal position (move the slider in the software to the left)
- Attach gear racks to clamps
- Inserts the rods into both clamps
- Install bearings on main frame and fix with srews
- Snap the rods into the frame
- Spread the clamps to the extreme positions on the left and right
- Insert servo and fix it with screws
- Attach Camera Spacer and UVC camera, fix with 4x screws and nuts M2 (optional)
- Mount to robot arm (optional)
4. Software Setup
# Install STServo SDK
git clone https://github.com/FEETECH-RC/STServo_SDK_Python.git
# Install dependencies
pip install pyserial
# Run gripper control
python software/python/gripper_control.py
📁 Repository Structure
├── assets/
│ └── images/
│ ├── assembly/ # Assembly step images
│ └── specification/ # Technical drawings
├── docs/
│ ├── assembly-guide.md # Step-by-step assembly
│ ├── bom.md # Bill of materials with links
│ ├── Parallel gripper by Robo9.pdf # Gripper product specification
│ ├── quick-start.md # Getting started guide
│ ├── SO-ARM101 by Robo9.pdf # SO-ARM101 product specification
│ └── specifications.md # Technical specifications
├── models/
│ ├── parts/ # Individual STL files
│ └── Follower_Gripper_180x180_BedSize.STL # Complete assembly (180×180mm bed)
├── simulation/
│ ├── README.md # Simulation overview
│ ├── gazebo/ # Gazebo guide
│ ├── mujoco/ # MuJoCo guide
│ ├── webots/ # Webots guide
│ ├── coppeliasim/ # CoppeliaSim guide
│ ├── isaac_sim/ # Isaac Sim guide
│ └── so_arm_101_description/ # ROS2 package (URDF, launch, Docker)
├── software/
│ └── python/ # Control software
└── examples/ # Usage examples
📖 Documentation
🔧 Hardware Requirements
Electronics
- 1× Feetech STS3215 Servo Motor
- 1× Bus Servo Adapter Board (Waveshare)
Mechanical
- 2× MF106ZZ Bearings (6×10×3 mm)
- 2× Aluminium/Carbon Tubes D6x1×125 mm
Fasteners
- 2× M4×8 DIN 7991 screws
- 4x M2x8 DIN 912 screws
- 4× M2 DIN 934 nuts
- 4× M3×4 DIN 913 set screws
Tools Required
- Phillips head screwdriver (PH1)
- Hex keys M2 (H1.5) and M4 (H2.5)
🖥️ Simulation
The SO-ARM101 can be simulated in 5 physics engines using a ROS2 description package with a single parameterized URDF. No ROS2 installation required -- Docker handles everything.
<div align="center">
| Gazebo (Ignition Fortress) | MuJoCo |
|---|
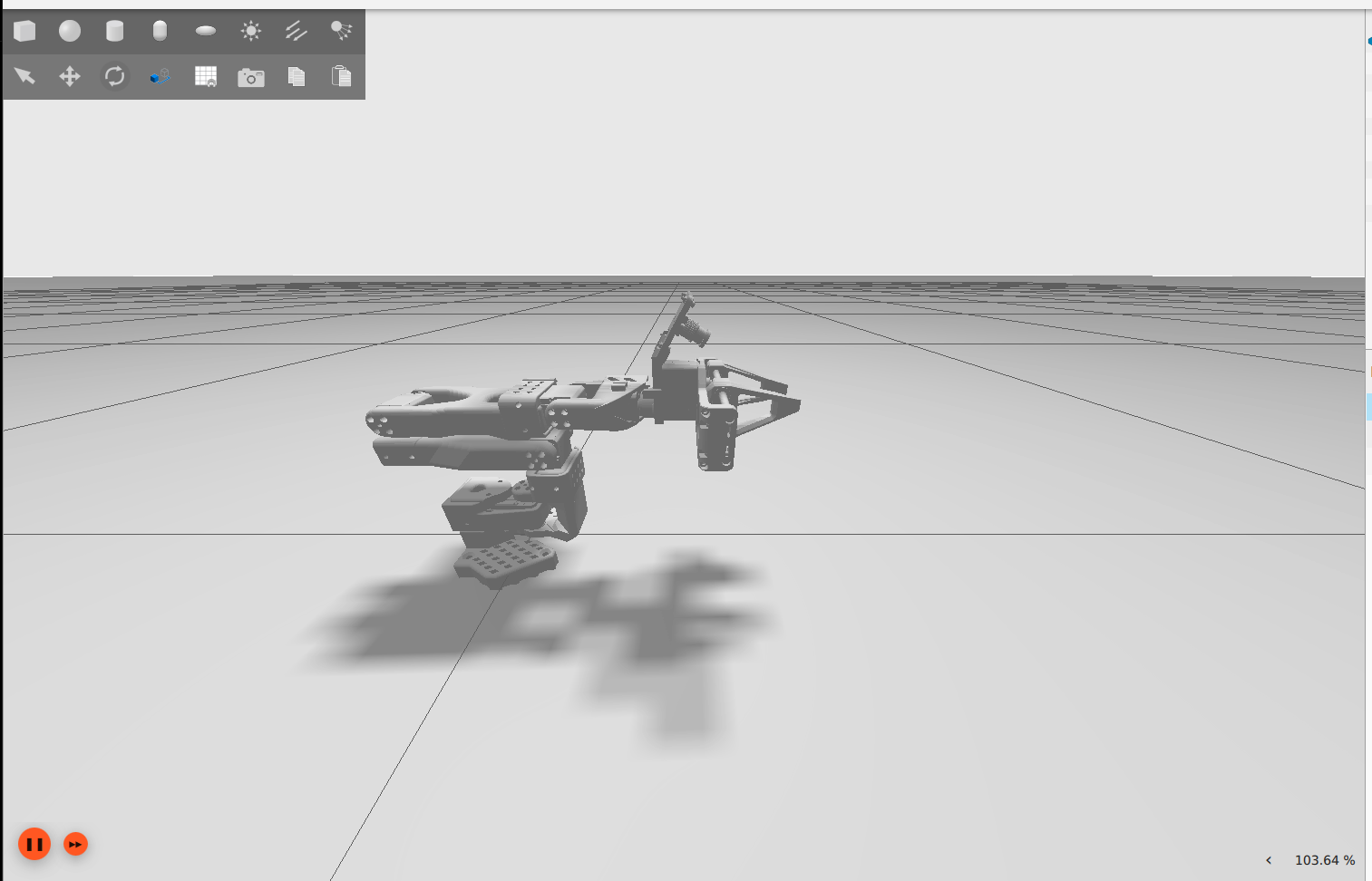 |  |
</div>
Quick start (Docker):
cd simulation/so_arm_101_description
docker compose run gazebo # or mujoco, webots
See the Simulation Guide for full setup, architecture details, and robot commanding.
🤝 Contributing
We welcome contributions! Please feel free to:
- 🐛 Report bugs and issues
- 💡 Suggest new features
- 🔧 Submit pull requests
- 📖 Improve documentation
📄 License
This project is licensed under the GPL-3.0 License - see the LICENSE file for details.
🔗 Links
👥 Engineering Team
| Name | Role | Contact |
|---|
| Boris Kotov | Software Engineer | Telegram |
| Alan Subin | Design Engineer | LinkedIn |
<div align="center">
Built for the robotics community by Robonine 🤖
Questions? We're here to help!
📩 Email: hello@robonine.com
</div>
Files in this package
- CAD source: RB9.01.062.000 Gripper.STEP
- Exports: Follower gripper (165x165 bed size).STL, RB9.01.060.074 Camera holder.STL, base_link.stl, clamp_1.stl, clamp_2.stl, link1_1.stl, link2_1.stl, link3_1.stl, link3_1.stl, link4_1.stl, link4_1.stl, link5_1.stl (+12 more)
- Images: 02-servo-with-gear-assembly.png, 03-mounting-interface.jpg, 07-gripper-on-so-arm100.jpg, 08-gripper-dimensions-3d.png, 09-gripper-holder-attachment.png, SO ARM 101 Parallel Gripper Live.jpg, clamp+rack.png, frame+bearings.png, frame-with-clamps.png, gazebo_pick_place.png, mujoco_pick_place.png, rods+clamps.png
- Documents: Parallel gripper by Robo9.pdf, SO-ARM101 by Robo9.pdf
Source & license
Imported into the CommunityCAD Archive with attribution preserved. All rights remain with the original author under the stated license.
